> Ezt folyamatosan tárolni kellene EEPROM területen, hogy ne vesszen el, ezzel viszont hamar elérném az EEPROM véges írási ciklusát, szóval ez sem jó...
Erre való az EERAM. Folyamatosan írsz bele, nem kopik, mert SRAM. Amikor elmegy a táp, azt érzékeli, és egy kondiban tárolt energia segítségével beírja a SRAM tartalmát a tokon belüli EEPROM-ba.
A 7805 nem melegszik, csak a Nano megy róla, a kimeneti driver IC nem sokat húz a kimeneteken. Persze a step-down a szép megoldás, de most így tesztre; jó lesz így.
Zavarszűrés a tápnak? Vagy zavarszűrés a bemenetekre? Melyikre gondolsz?
Nem terveztem bele watchdog-ot, mivel azt egy külső aktív elemnek kellene vinnie, pld. egy másik Ardu. És ha az fagy le?
Ha van erre valamilyen konkrét megoldásod; mindenképp érdekelne!
Áramszünet után a program az elejétől indul el. Ha onnan szeretném folytatni, ahol épp volt, akkor le kellene tárolnom EEPROM-ba egyrészt az összes kimenet értékét minden változáskor, valamint kellene egy programmutató, amit szintén. Ezt folyamatosan tárolni kellene EEPROM területen, hogy ne vesszen el, ezzel viszont hamar elérném az EEPROM véges írási ciklusát, szóval ez sem jó...
24V-->5V egy step-down nem lett volna jobb? Esélyes, hogy a 7805 durván melegedni fog. PLC-t zavarszűrés nélkül elég meredek dolog csinálni, pláne, ha kapcsolószekrénybe kerül.
Kis kínai Nano, nagy olasz Nano, nagy brit arm is le fog fagyni, ha úgy tartja kedve. És akkor lehet felmászni a létrán és resetet nyomkodni.
Az áramszüneti protokoll az, hogy áramkimaradás esetén hogyan tér vissza aktív állapotba, mit indít, ha programját honnan kezdi (ha kezdi egyáltalán).
Egyik sem "must have", de ettől függetlenül én hasznosnak találom ezeket a funkciókat, és felügyelet nélküli rendszerekbe integrálom is.
Specifikus kérdéseim: 1. illesztést a kimenő oldalon milyen IC-vel oldod meg? 2. Tápellátás, zavarszűrés?
3. Watchdog? Áramszüneti protokoll?
Érdekes a koncepció, de nem egyedülálló. Csináltak hasonló elven az ipari PLC-k árának töredékéért hasonló termékeket, bár a tiédtől némileg eltérő programozási koncepcióval.
Ami a lényeg; régóta szerettem volna építeni egy olyan PLC-t, ami mikrovezérlő alapokon nyugszik, és a költségei töredéke egy gyári PLC-nek.
Afféle "hobby" PLC-t, ami lehetőség szerint mindenben megegyezik a nagyokkal, de jóval olcsóbb. Otthoni automatizálásra, stb.
Régebben PIC alapon próbáltam, de az nagyon bonyolult volt, nem sikerült a végéig jutni.
Az Arduino sokkal kezesebb, és ha csak a saját nyelvén programozom is; majdnem a célnál vagyok.
Persze a végső cél az, hogy létrában lehessen programozni, és belső működés tekintetében kövesse egy valódi PLC logikáját.
Ehhez a PC alapú szoftver már kész, van egy általam írt PLC szimulátor, amelyet bővíteni szeretnék úgy, hogy az ott elkészített létra áttölthető legyen az Arduino-ba, és úgy fusson, mint az elvárható.
Tehát nem HEX állományt gyártanék, hanem olyankódot, amit az Arduino-ban található (már kész) program tárol és feldolgoz, újra és újra végrehajt ciklikusan, ahogy kell.
A PC szoftvert kell még bővíteni ezzel a tudással.
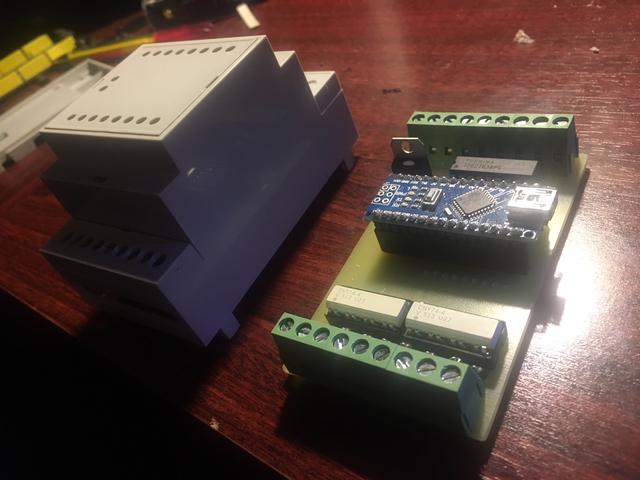
Maga a NYÁK, amit a fotón látsz, tulajdonképpen egy 24V-ra illesztő shield. Optocsatolós bemenete van, és driver-IC-s kimenete.
Ez méretre van tervezve egy olyan PLC-szerű dobozhoz, amit megadja a szükséges külsőt, C-sínre tehető, sorkapcsos csatlakozású.
AVR-en az int 16 bit szokott lenni. Ha biztosra akarsz menni, akkor kerüld az intet, és használj helyette pontosan mindig ugyanakkora méretű változót, például uint16_t vagy ha kellenek negatív számok is, akkor int16_t.
Minden digitális memória legkisebb egysége a bit, amikből nyolc egy byte. Ezeket aztán platformtól függően lehet csoportokba szervezni. Az AVR egy 8 bites platform, így a memóriája bájtonként van struktúrálva. Mivel az int 16 bit, ezért két bájton fér el. Ezt a két bájtot kell külön elraknod az EEPROMba, majd visszaolvasni, és összerakni integerré. Többféle megoldás is létezik erre, leírok neked hármat.
1 Bitműveletek
16 bites adat két bájtja:
uint16_t data = 1976;
uint8_t dataLowByte = (uint8_t) ((data) & 0xff);
uint8_t dataHighByte = (uint8_t) ((data) >> 8);
Ezután az alsó és a felső bájtot már könnyen kiírod.
Visszafelé pedig a fordítottja:
uint8_t dataLowByte = EEPROM.read(addressLow);
uint8_t dataHighByte = EEPROM.read(addressHigh);
uint16_t data = (dataHighByte << 8) | dataLowByte;
De az Arduinoban ezekre a gyakran használt műveletekre van makró is:
Készítettem egy akvárium világítás vezérlést, ahol PWM-el szabályzom (IRF510-en keresztül) a LED szalagokat.
Fehéret, pirosat, kéket. A célom az volt, hogy ne egyszerűen csak be-, vagy kikapcsoljanak a fények, hanem megfelelően dimmelve szimulálja a beesteledést, és a pirkadatot.
Teljesen jól működik, de valamiért az egész zavaróan vibrál....
Tettem kondenzátorokat a kimenetekre, - és a bejövő tápra is, - valamelyest javult, de még mindig látni vélem a vibrálást....
Van rá valamilyen ötletetek? Találkoztatok ilyesmivel? Lehet, hogy a negyfrekvenciás terhelést nem szereti a táp?
Itt a kód is, a piros és kék szineken van egy 0.75-ös szorzó, mert nem kell a teljes fénye, valamint a kék éjszakára 50-es értéken marad.
void setup() { rtc.stopRTC(); //stop the RTC rtc.setTime(20,40,0); //set the time here rtc.setDate(2,1,2018); //set the date here rtc.startRTC(); //start the RTC }
void loop() { hr = rtc.getHours(); mins = rtc.getMinutes();
//Set White if (hr <= 6) PWM = 0; if (hr == 7) PWM = Value[59 - mins]; if (hr >= 8 && hr <= 20) PWM = 255; if (hr == 21) PWM = Value[mins]; if (hr >= 22) PWM = 0; analogWrite(WhitePin, PWM);
//Set Red if (hr <= 5) PWM = 0; if (hr == 6) PWM = Value[59 - mins] * 0.75; if (hr >= 7 && hr <= 21) PWM = 255 * 0.75; if (hr == 22)PWM = Value[mins] * 0.75; if (hr >= 23) PWM = 0; analogWrite(RedPin, PWM);
//Set Blue if (hr <= 5) PWM = 0; if (hr == 6) PWM = Value[59 - mins] * 0.75; if (hr >= 7 && hr <= 21) PWM = 255 * 0.75; if (hr == 22)PWM = Value[mins] * 0.75; if (hr >= 23) PWM = 0; if (PWM < 50) PWM = 50; analogWrite(BluePin, 50);
int Relay0 = 13; int Relay1 = 5; int Relay2 = 6; int Relay3 = 10;
DS3231 rtc(SDA, SCL); Time t;
const int OnHour0 = 17; const int OnMin0 = 30; const int OffHour0 = 17; const int OffMin0 = 31; const int OnHour1 = 12; const int OnMin1 = 26; const int OffHour1 = 12; const int OffMin1 = 27;