Persze, hülyeséget mondtam (mert gyorsan írtam). Szóval egy funktor egy kategóriából képez egy (általában) másik kategóriába: objektumokhoz objektumokat rendel, morfizmusokból pedig morfizmusok. Az általam az utolsó bekezdésben felhozott példák is különböző kategóriák között hatnak. Pl. a fundamentális csoport a topologikus terek kategóriájából képez a csoportok kategóriájába.
A funktor az olyasmi, mint egy függvény, ezért is hasonlít elnevezésében a "function"-re: egy kategórián belüli objektumokból csinál ugyanazon kategórián belüli objektumokat
Ez biztos? Én úgy tudtam, hogy a funktor kategóriák közötti leképezés, tehát nem kell ugyanabba a kategóriába képeznie, ahonnan képez, és a wiki is ezt írja: "In mathematics, a functor is a type of mapping between categories arising in category theory. Functors can be thought of as homomorphisms between categories."
A funktor az olyasmi, mint egy függvény, ezért is hasonlít elnevezésében a "function"-re: egy kategórián belüli objektumokból csinál ugyanazon kategórián belüli objektumokat (azért nem függvény, mert egy kategóriának lehet "túl sok", azaz nem halmaznyi eleme).
Pl. a valós vektorterek és a köztük levő lineáris leképezések kategóriát alkotnak, ezért V*=Hom(V,R) egy funktor, ami minden vektortérhez hozzárendeli a duálisát. A Hom a vektorterek esetén a lineáris leképezéseket jelenti, általában pedig a morfizmusokat az adott kategórián belül (a morfizmus hozzátartozik a kategória fogalmához). Pl. a csoportok kategóriájában a Hom a csoporthomomorfizmusokat jelenti, a topologikus terek kategóriáján belül a folytonos leképezéseket, a halmazok kategóriáján belül egyszerűen a függvényeket. A reprezentálható funktor fogalma ezek után egyszerű, lásd itt.
A funktorok nagyon fontosak a matematikában, itt van pár példa: Galois-csoport (ami testekhez rendel csoportot), a fundamentális csoport (ami topologikus terekhez rendel csoportot), algebrai varietás függvénygyűrűje és függvényteste (ami algebrai varietásokhoz rendel gyűrűt és testet).
"Ha V és W két véges dimenziós valós vektortér, akkor Hom(V,W) jelöli a V és W közötti lineáris leképezések vektorterét (aminek elemei a bázisok rögzítése után mátrixokkal azonosíthatók). Ez kanonikusan izomorf a V*=Hom(V,R) duális tér és a W tenzorszorzatával."
Köszönöm!
Igazán előkelő név egy egyszerű dologra. :) A Wikipédián próbáltam utánanézni a "Hom funktor"-nak és ott nagyon repkedtek a kategórielméleti fogalmak: https://en.wikipedia.org/wiki/Hom_functor
A reprezentálható ko-előkéve ("representable copresheaf") például nekem teljesen kínaiul van. :o
Nem kell hozzá kategórielmélet. Ha V és W két véges dimenziós valós vektortér, akkor Hom(V,W) jelöli a V és W közötti lineáris leképezések vektorterét (aminek elemei a bázisok rögzítése után mátrixokkal azonosíthatók). Ez kanonikusan izomorf a V*=Hom(V,R) duális tér és a W tenzorszorzatával.
Amikor a fizikusok (n,m) típusú tenzorról beszélnek egy M sokaságon, akkor valójában n darab TM és m darab TM* tenzorszorzatának egy szeléséről beszélnek (TM az érintőnyaláb, TM* a ko-érintőnyaláb). A típus csak arra utal, hogy báziscsere esetén a tiszta tenzor hány változóban transzformálódik kontravariánsan és hány változóban kovariánsan. A matematikusok szeretik a bázisfüggetlen definíciókat, hiszen azok kanonikusabbak.
Pl. a metrikus tenzor (0,2) típusú, azaz a TM* x TM* egy szelése (ahol x a tenzorszorzat), más szóval a Hom(TMxTM,R) egy szelése. Tehát a metrikus tenzort felfoghatod két darab kovektorból képezett tiszta tenzorok lineáris kombinációjának (egy konkrét bázist használva az együtthatók a szokásos gij számok a metrikus tenzor mátrixában), de felfoghatod úgy is, mint ami két darab vektor tenzorszorzatához rendel valós számot, azaz két darab vektorhoz rendel bilineárisan egy számot (ez lenne a skalárszorzat).
Hasonlóan, a görbületi tenzor (1,3) típusú, azaz a TM* x TM* x TM* x TM egy szelése. Ez utóbbi tér persze azonosítható Hom(TM x TM x TM x TM*, R) vagy a Hom(TM x TM x TM, TM) térrel, kinek mi az ízlése.
Megnéztem, hogy mi az a "Hom functor" (és nem, nem értem, mert fizikusi végzettségem miatt hiányoznak nálam a kategóriaelméleti alapok). A Riemann-sokaságot, metrikus és a görbületi tenzor fogalmát viszont szvsz értem.
úgy tudom, hogy két vektor skaláris szorzata azt jelenti, hogy az első vektorhoz hosszáadom a második vektor azon összetevőjét ami párhuzamos az első vektorral
Két vektor skaláris szorzata hagyományosan ezt jelenti: a két vektor hosszának szorzata szorozva a két vektor által bezárt szög koszinuszával. Izlés dolga, hogy melyik fogalmat tartjuk alapvetőbbnek: a vektorhossz fogalmát és a vektorok által bezárt szög fogalmát, vagy a vektorok skaláris szorzatának fogalmát. Az elsőből megkapjuk a másodikat és viszont. Hagyományosan (pl. a középiskolai tananyagban) előbb van a hossz és a szög fogalma, és abból származtatjuk a skalárszorzatot, a modern felfogásban (pl. egy Riemann-sokaság adott pontbeli érintőterén) pedig fordítva.
A metrikus tenzor egy skalárszorzat fogalom a teljes érintőnyalábon. Az érintőnyaláb az egyes pontokbeli érintőterek uniója. Minden pontban van egy érintőtér (ami az adott pontbeli lehetséges sebességvektorok halmaza), azon pedig egy skalárszorzat (ami által az adott pontbeli sebességvektoroknak hossza lesz, illetve bármely két ilyen sebességvektor által bezárt szög is értelmezve lesz), és ezek együtt alkotják a metrikus tenzort. Tehát a metrikus tenzor megadása ekvivalens a sebességvektorok hosszának, illetve a közös pontból kiinduló sebességvektorok által bezárt szögek megadásával.
Egyébként ha nem tanultál lineáris algebrát (beleértve a duális tér, a Hom funktor és a tenzorszorzat fogalmát), akkor bajosan fogod megérteni a Riemann-sokaság és vele együtt a metrikus és a görbületi tenzor fogalmát.
"úgy tudom, hogy két vektor skaláris szorzata azt jelenti, hogy az első vektorhoz hosszáadom a második vektor azon összetevőjét ami párhuzamos az első vektorral"
úgy tudom, hogy két vektor skaláris szorzata azt jelenti, hogy az első vektorhoz hosszáadom a második vektor azon összetevőjét ami párhuzamos az első vektorral. Ha a koordinádtarendszert úgy választom meg, hogy az első vektor párhuzamos legyen az x tengellyel, akkor a skaláris szorzat képletében szereplő szög az x tengely és a második vektor által bezárt szöget jelenti.
De viszont nem értem, hogy ebben az esetben a skaláris szorzatnak mi köze van a térbeli távolsághoz?
Úgy tudom, hogy ha koordinátákkal írok le egy vektort, akkor az minden esetben azt jelenti, hogy ha ezt a vektort felbontom a koordinátangelyekre párhuzamos összetevőkre, akkor ezek az összetevők az origóból indulnak ki (ami igaz az eredeti vektorra is). Aztán attól függően, hogy ésőbbiekben minek a meghatározására van szükség ezeket az összetevő-vektorokat el lehet tolni de csakis a hatásvonalán, ami igaz az eredeti vektorra is (ami az összetevőkből áll). vagy ezt is rosszul tudom?
továbbá bármely két érintővektor skaláris szorzata nxn számmal fejezhető ki
Pontosabban fogalmazva: a skaláris szorzat mint függvény elkódolható egy nxn-es mátrixba (a mátrix i. sorának j. eleme nem más, mint az i. és a j. bázisvektor skaláris szorzata).
Egy adott pontban az érintővektorok a lehetséges irányok, amerre lehet menni a térben. A metrikus tenzor az a függvény, ami tetszőleges pontban tetszőleges két érintővektorhoz hozzárendeli azok skaláris szorzatát. Ezek a definíciók, nincs benne semmiféle mátrix. Ez geometria.
Na most ha egy adott P pontbeli érintőteren felveszel egy n elemű bázist (tehát n a sokaság dimenziója), akkor bármely P-beli érintővektor n számmal fejezhető ki (a számokat koordinátáknak hívják), továbbá bármely két érintővektor skaláris szorzata nxn számmal fejezhető ki: ezek alkotják a metrikus tenzor P-beli mátrixát (az adott bázisra nézve). Ez lineáris algebra.
Akárhol választasz egy pontot bármelyik térbeli pontba X helyvektor mutat (egy teszőleges rögzített pontból).
Azt kell megmondani, hogy a koordinátavonalakkal párhuzamos vonalak metszéspontja X végpontja, soroljuk fel az X koordinátáit.
Ez n db koordinátavonal, ebben a pontban mindegyiknek (ha) létezik az érintővektora. Célszerűen egységvektorok.
Na ezekkel az egységvektorokból képzett nxn mátrixot ha kitöltöd ebben az érintővektor rendszerben kovariáns metrikus tenzort parciális deriválásokkal (az összes parciális derivált kell tehát az összes vegyes is).
Tulajdonképpen X koordinátái legyenek kontravariáns koordináták. Ezért ahogy az előbb mutattam, a helyvektor hossza meghatározható. A pont elcsúszik valamelyik koordinátavonalon akkor értelmes hogy mekkora az ívhossza annak a koordinátavonalnak a két pont között. Ezt a tér minden pontjában ki kell molyolgatni. Ez fogja magát a teret leírni. Önmagát a teret.
De nem erre használják a mérnökök!
Hanem arra, hogy az előző egy ismert konfiguráció. Ugyanaz a tér különböző transzformációkkal görbül.
Ezt úgy kell elképzelni, mint pl. egy kéttámaszú tartót. Tudjuk hol volt egy pontja, hova került terhelés estén.
Mekkora egy térfogatelem változás, nyúlás, relatív nyúlás..... Mindent lehet számolni. Csak nem egyszerű.
De építőknek van kontinuum mechanika nem?
Hát úgy a legjobb gondolkodnod, hogy egy terhelt tartót tetszőleges felülettel (ebből a legegyszerűbb a sík) elmetszve a terhelt keresztmetszetet, minden egyes pontjában meg kell adni a feszültségtenzort. pl. ehhez minden pontjában ismerni kelél a normál és a csúsztató feszültségeket. Ez pont az a témakör amiben ezt a jelölésrendszert a mérnökök használják is.
Ez a mérnöki megfontolás elsősorban ilyen három dimenzióra vonatkozik persze.
Az előző pontbeli homogonitás, izotrópia, egyszeresen összefüggő zárt síkbeli tartomány... pl. ez nem játszik mert
pl. marék alu hab felülete sok sok (pl. Everet féle) felülethez hasonló térbeli zárt tartomány, de nem egyszeresen összefüggő..
Na az a kérdés ezt megterhelve egy felületi erőrendszerrel milyen lesz a terhelés után elmozdulás és feszültségmező.
Ezt úgy kéne értelmezni, hogy ha elképzeljük ezt a fizikai teret, akkor az oszlopvektorban lévő tagok valójában a koordinátatengelyekkel párhuzamos vektorok, amik a koordinátarendszer origójából indulnak ki?
Amúgy világos, hogy ha a metrikus tenor elemeivel beszorzom az egyes négyzetes tagokat, akkor azok módosulni fognak, vagyis ez azt jelenti, hogy adott pontban a koordinátatengelyekkel párhuzamos irányokban vagy rövidülni vagy növekedni fog az adott távolság, ami végső soron azt jelenti, hogy maga a tér fog "összenyomódni" vagy "széthúzódni" és hogy ha ezek az eltérések a tér pontjaiban eltérőek, akkor így az adott fizikai tér görbültségét is le lehet írni. Vagy rosszul gondolom?
Egyébként a gyökkifejezést hívják értinővektornak?
Másrészről gondolom, hogy a metrikus tenzornak a tér egy pontjában csak egy mátrixát lehet értelmezni, ami megszabja, a tér "görbületét". Magát a tezort nem lehet valahogy kifejezni, ami már több ponton van értelmezve?
Annyira nem a jelölésekre voltam kíváncsin inkább a metrikus tenzor használhatósága érdekelt.
de az utolsó bekezdésben mit értettél ez alatt:
"Az baj, hogy ez egy jelöléstechnikailag is roppant nehézkes téma. Általában ezt már nem tanulják meg a mérnökök. A jövő anyagai szerkezete csak így lesz leírható pedig. Feladjuk a homogenitást, izotrópiát, és a geometriai megkötések: n szeresen összefüggő lesz a tartomány amit az anyag kitölt."
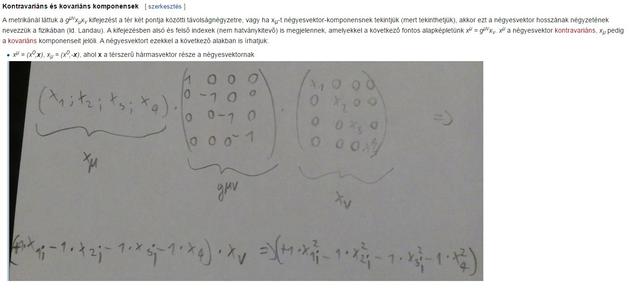
Hát ami fel van írva valóban egy vektor mégpedig az x vektor normája. Azaz önmagával vett skalárszorzatának abszolút értékének a négyzetgyöke lenne az Euklideszi norma vagy Euklideszi távolság.
Csak kiindulok a definicióból azaz x^2=xx=gikxixk=xixi =gikxixk
Ezzel az összes jelölés elmondható egyébként
(alsó index ha latin betű akkor 2 nél nagyobb pozitív számokat jelent azaz legalább 3
Ha görög betű akkor legfeljebb kettő
Ez csupán mérnököknek (térbeli és síkbeli feladatok))
alsó index kovariáns (mérnököknek: sorvektor, azaz oszlopvektor transzponáltja)
felső index kontravariáns bázisra vonatkoztatott mennyiség (oszlopvektor, jobb úgy gondolni rá, hogy default, aza nem sorvektor transzponáltja mert oszlopvektorok terében írjuk inkább fel a problémát pl: egy helyvektor koordinátái kontravariáns koordináták)
felül és alul azonos index akkor Einstein konvenció szerint ezen koordináta szerint összegezni kell
vagyis xixi szorzatokat össze kell adni
gik ha( akár metrikus akár nem) tenzor ebből három féle lehet
gik, gik, gik
g attól lesz metrikus tenzor, ha definició szerint számolod, egységnyi hosszúságú érintővektorai az i,j=1,2,3,(4) (jelen esetben az i, j irányú koo vonalaknak) külső szorzatai (egységvektorai)
térben vektoriális szorzat (i=3 ig)
Akkor még egy cirkusz van itt felírva : a kontrahálás, vagy kontrakció (ez lehet többszörös is)
mindahány kifejezésben felül és alul azonos az index az egybe van ejtve, azaz elhagyható a maradék indexekkel lehet manipulálni tovább. (gikxixk=xixi ez itt)
Ez egyébként úgy is mondjuk egy vektor, hogy a kovariáns mértéktenzor hoz tartozó kovariáns bázisban felírt kontravariáns vektor koordinátái szorzata a kovariáns koordinátája a vektornak.
Azaz a ko vagy kontravariáns mértéktenzor emeli vagy süllyeszti az indexeket.
Az baj, hogy ez egy jelöléstechnikailag is roppant nehézkes téma. Általában ezt már nem tanulják meg a mérnökök. A jövő anyagai szerkezete csak így lesz leírható pedig. Feladjuk a homogenitást, izotrópiát, és a geometriai megkötések: n szeresen összefüggő lesz a tartomány amit az anyag kitölt.
P.S. És persze érintővektor hosszúságához a két oszlopvektort azonosnak kell választani, tehát a balról szorzó sorvektor legyen transzponáltja a jobbról szorzó oszlopvektornak.
A 4x4-es mátrixot (ami a metrikus tenzor egy adott pontban egy adott bázisra nézve) balról egy 4 hosszú sorvektorral kell szorozni, jobbról pedig egy 4 hosszú oszlopvektorral, és akkor az eredmény már egy szám lesz. Hiszen bilineáris formáról van szó, ami 2 vektorból csinál egy számot (ha 2 oszlopvektorból indulsz ki, akkor az elsőt transzponáld először, hogy sorvektor legyen belőle).
Értem, most legalább közelebb kerültem ennek a témának a megértéséhez. Viszont a wikipédián van egy oldal erről. Ezt képként feltöltöm a mellékletben és a képen szerepel az is, hogy a gykorlatban, hogyan is kell számolni ezzel. Ha viszont ez jó, akor az nem világos a számomra, hogy a négyzetes kifejezés már egy számot jelent vagyis az adott térben lévő hosszúságot jelöli, viszont ha a metrikus tenzort szorzom a (X)v mátrixal és a (X)µ vektorral. akkor szontén vektort kapnék nem pedig egy számot...
Intuitívan a metrikus tenzor arra szolgál, hogy bármilyen sokaságon a mozgó pontok sebességét - és ezáltal a pont által megtett utat - mérni (avagy definiálni) lehessen. A sokaság a szokásos n-dimenziós euklideszi tér általánosítása: olyan tér, ami lokálisan úgy néz ki, mint az n-dimenziós euklideszi tér (pl. az ellipszoid az egy 2-dimenziós sokaság, mert minden pontja körül úgy néz ki, mint az euklideszi sík egy kis darabja). Persze ha egy sokaságot egy euklideszi tér részének képzeljük el - pl. az ellipszoidot a 3-dimenziós tér részeként - akkor nincs szükség a metrikus tenzorra, hiszen az euklideszi metrika megadja a sokaság érintővektorainak is a hosszát. Csakhogy általában egy sokaságot nem egy euklideszi tér részeként definiáljuk, hanem a belső struktúrájával. (John Nash híres tétele, hogy minden Riemann-sokaság beágyazható euklideszi térbe, de ez más tészta.)
Konkrétan egy mozgó pontnak minden pillanatban van egy pillanatnyi sebessége - ami matematikailag a sokaság egy érintővektora az adott pontban - és a metrikus tenzor adja meg ennek a vektornak a hosszát. Ezt a sebesség-hosszúságot kell integrálni, hogy megkapjuk a megtett távolságot.
Ha a sokaság n-dimenziós, akkor egy adott P pontban az érintőtere egy n-dimenziós valós vektortér. A metrikus tenzor ezen az érintőtéren definiálja a vektorok hosszát (vagy általánosabban bármely két vektor skaláris szorzatát, azaz a hosszuk mellett az általuk bezárt szöget is). Precízebben: a metrikus tenzor egy pozitív definit bilineáris forma bármely P pontbeli érintőtéren. Ha felveszel egy bázist ezen a vektortéren, akkor a bilineáris forma egy nxn-es (szimmetrikus pozitív definit) mátrixba kódolható el, hiszen ha tudjuk bármely két bázisvektoron az értékét, akkor bármely két vektoron is tudjuk az értékét (a bilinearitás miatt).
Tehát a metrikus tenzor segítségével tudunk távolságokat és szögeket mérni (definiálni) egy sokaságon, és így azt is, hogy globálisan mennyire más a sokaság, mint az euklideszi. Pontosabban: a metrikus tenzorból kiindulva mérhető az adott irányú kicsiny háromszögek szögösszegének eltérése a pi-től a háromszög területéhez viszonyítva, és ez a viszonyszám a szekcionális görbület. Mindezt az információt tömören ragadja meg a görbületi tenzor. Tehát a metrikus tenzorból kiindulva megkaphatjuk a görbületi tenzort, az eredményt megtalálod a Wikipedia oldalain. A pontos definíciókhoz és a számoláshoz szükség van némi matematikai előképzettségre (mi az a sokaság, mi az érintőtér, mit értünk vektorterek tenzorszorzatán stb.), de a lényeget elmondtam fent.
Azt tudom, és a neten is meg lehet találni, hogy a metrikus tenzor mit jelent (a tenzor elemszámától függően egy n- dimenziós tér görbültségét lehet vele meghatározni). . egy leaikus ember sokkal jobban megértené ezt a témakört ha valamilyen példát lehetne erre találni, de nem csak magára a metrikus tenzorra, hanem, hogy pl. annak segítségével, hogyan változnak meg a távolságok egy görbült térben.
Pl. nem találtam erre vonatkozóan semmilyen információt:
-a metrikus tenzort ki lehet terjeszteni n- dimenziós térre is, de minden esetben egy qxp elemszámú transzformációs mátrix lesz belőle.
-az n dimenziós tér koordinátáit ki lehet fejezni, egy n elemszámú vektorral és ha ezt megszorozzuk ezzel a "transzformációs mátrixal" akkor az egyes távolságok lerövidülnek a tenzor elemeinek értékétől függően
- egy m dimenziós tér görbülete azt jelenti, hogy a térben értelmezett távolságok megnyúlnak, vagy lerövidülnek. attól függően, hogy a tér görbültsége milyen alakot vesz fel.
A kérdésem az lenne, hogy a fent felsorolt állítások mennyire megfelelnek meg a valóságnak?
Elnézést kérnék, ha helyenként nem fogalamaztam elég egyértelműen. De a lényeget asszem le tudtam írni.
Feloldható csoport alatt arra gondolunk, hogy van olyan normállánca, ahol a szomszédos csoportok hányadosa prímrendű ciklikus csoport.
Tudjuk hogy a polinom minden gyöke C-be esik, ezért szabad a bővítésekre úgy gondolni, hogy konkrétan C adott elemeit adjuk hozzá a meglevő testhez.
Ha van egy akármilyen képleted, amelyben az egyik oldalon Q elemei, (prímalapú) gyökvonások és testműveletek állnak, a másik oldalon pedig a polinom gyökei, akkor a gyökképlet megad egy konkrét testbővítés láncot Q-ból Q[f]-be, ahol minden bővítés prímrendű.
Ez a Galois alaptétel szerint megadja G[f]-nek egy ugyanilyen lánccát, tehát G[f] feloldható. (S5 - höz például nem létezik ilyen lánc.)
Megfordítva: ha G[f]-nek van ilyen láncca, akkor f gyökei benne vannak egy olyan testben amit Q-ból kapunk kizárólag prímrendű ciklikus bővítésekkel (prímalapú gyökvonásokkal), tehát elő is állnak a gyökök valahogy.
(Ebből még nem adódik hogy n=2,3,4-re létezik olyan képlet, amelybe elég beledobálni a polinom együtthatóit. A gyökképlet létezése és a polinom gyökeinek valahogy történő előállítása különböző problémák. Bár ha a gyökök nem állnak elő valahogy, akkor értelemszerűen gyökképlet sincs.)
((Ez az eszmefuttatás csak azt mutatja meg, hogy hogyan kapcsolódik össze a megoldhatóság a feloldhatósággal fogalmilag. Ha van bármiféle matematikai tartalma, az pusztán a véletlen műve.))
Igyekeztem kifejteni a 14682-ben. A részletes bizonyításhoz fel kell valamennyire építeni a csoportelméletet, a testelméletet, majd a Galois-elméletet. Fried Ervin: Általános algebra könyvében a 176-188. oldal tárgyalja a gyökjelekkel való megoldhatóságot, de ehhez tudni kell a 159-175. oldalakat (testelméleti alapok), illetve az 50-109. oldalakat (csoportelméleti alapok). Szóval ezt nem lehet röviden elmondani, sok a technikai részlet. De annyit mondhatok, hogy a negyedfokú egyenlet visszavezetése harmadfokúra, majd a harmadfokú visszavezetése másodfokúra pontosan megfelel annak, ahogy az S4-ről és az S3-ról igazoljuk, hogy feloldható.
Pl. az S3-nak egyetlen nemtriviális normálosztója az A3, a faktor pedig S3/A3=C2 kételemű ciklikus, ezért a gyökökhöz két lépésben jutunk el a racionális számokból: egy másodfokú (ciklikus), majd egy harmadfokú (ciklikus) bővítéssel. A másodfokú bővítéshez kell vennünk a négyzetgyököt, a harmadfokúhoz pedig a köbgyököt. A másodfokú bővítés nem más, mint az A3 által fixált résztest, amit - mint meggondolható - generál az (x1-x2)(x2-x3)(x3-x1) szorzat (ahol xi-k a gyökök). Az (x1-x2)(x2-x3)(x3-x1) négyzete nem más, mint a harmadfokú egyenlet diszkriminánsa, ez kerül tehát a négyzetgyök jel alá a formulában. És miután megoldottuk a másodfokú egyenletet (tehát eljutottunk az A3 által fixált másodfokú bővítéshez) vonunk köbgyököt. Lásd a (18)-as képletet itt: w3-re van egy másodfokú egyenletünk, aminek diszkriminánsa a harmadfokú egyenlet diszkriminánsa. Vagy lásd a (88)-(93) képleteket, ami ugyanezt mondja kicsit másként.