Sima 3mm-es víztiszta tokozású kék ledeket használtam. Meg CA3130 IC-t. Az IC kimenetét le kell húzni GND-re egy 5-10k-s ellenállással, ha Arduino-ba akarod bekötni különben nem ad stabil kimenetet. Meg 5V táp kell neki és ennyi.
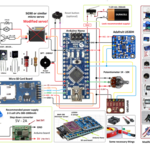
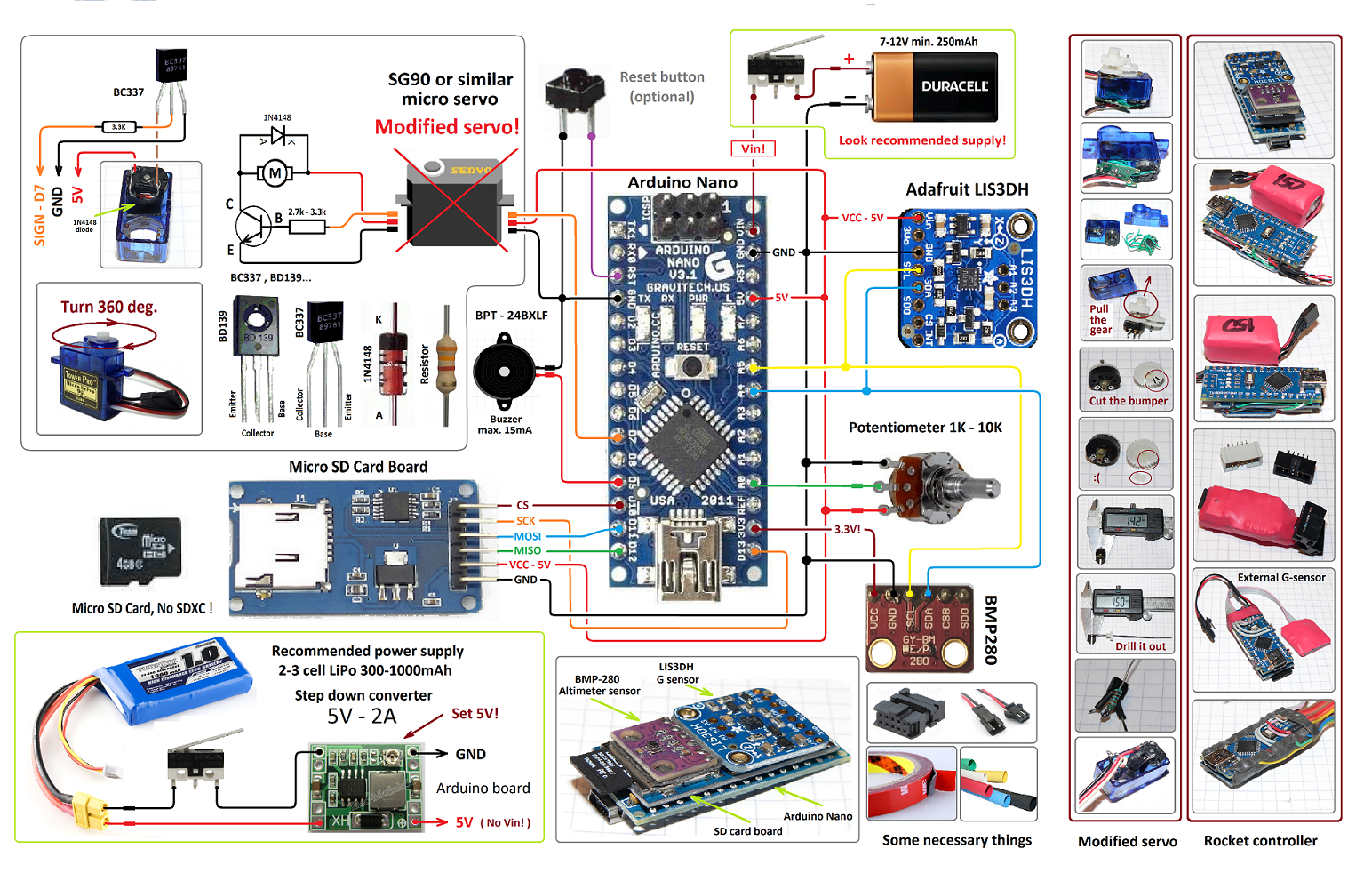
Elkészült a kapcsolási rajz nagyjából végleges változata.Próbáltam ilyen közérthető módon lerajzolni, ha valami nem tiszta, vagy hibás, írjatok, javítom.
A fotoszenzornak mindegy milyen az ég, mivel az mindig világosabb lesz, mint a föld.
Egyedül a fehér felület (=havas táj) tudja megbolondítani, de talán ez nem olyan nagy gond Mo-n.
Nekem egyszer napfelkeltekor pont "belenézett" a napba és zuhant még vagy 60m-t lefelé mire nyitott az ernyő. Szerencsére csak az ernyő sérült kicsit, de a rakéta épségben leért. Ezt a hibát pl két db a törzsön átellenesen elhelyezett szenzorpárral lehet kiküszöbölni és nyitni amint az egyik is jelez. Mivel filléres alkatrész, simán lehet belerakni 2db-ot is.
Elég nyűgös ez, mert zajos a jel a rezonanciák miatt. Szűrni kell, kivenni a tüskéket, atán vizsgálni a változásokat.
Ahogy AWS is írta, és nekem is végre tisztul a kép, hogy bár az asztalon +-1G-t mér, de repülés közben, holtpont közelében nincs jelentős változás a G erőben, az hogy átfordul és negatívba vált az ott, szabadesésben nem jelentkezik.
A baro szenzor értéke pedig gyakorlatilag méterre pontos, ha van is benne zaj, az 1-2 méter magasságnak megfelelő nyomásváltozás, azaz a mi elvárásainkhoz képest szinte semmi.
Most, hogy mondod emlékszem rá, volt erről egy hosszabb eszmecsere.
Mindenesetre úgy gondolom, hogy a G szenzor jelére nem érdemes programozni a vezérlés.
Viszont ez a fényérzékelő szenzor most eszembe sem jutott. Régebben én is próbáltam és egész határozott értékeket adott, poziciótól függően. Úgy sem találok értelmes funkciót az analóg bemenetnek, lehet inkább ezt kellene ráakasztani, mint egy potit, vagy kapcsolót.
Ma már elég olcsón lehet gyroval is rendelkező unitot venni, abból egyértelmű a holtpont. De teljesen igazad van hogy a bariometrikus módszer a legegyszerűbb és a legjobb.
Szerintem amúgy háromtengelyes gyorsulásmérő használata esetén talán az eredő gyorsulásból is meg lehet találni a holtpontot, ha elég érzékeny a szerkezet. Ugyanakkor minek szenvedni vele, ha lehet bariometrikusan is nyitni...
Ezt a konkrét indítást még nem emlékszem hogy olvastam volna Nakkánál. Nagyon tanulságos.
Jó nagy vita volt erről a témáról vagy 10 éve itt a fórumban.
Szóval: a gravitáció természetesen hat a rakétára, ha nem hatna akkor elszállna a világűrbe és tovább :)
Viszont a rakéta fedélzetén végig súlytalanság van (vagyis lenne, ha nem lenne légkör és ezért légellenállás). Az elhajított kő esete fizikailag.
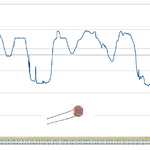
Szerencsére nem mi vagyunk az elsők, akik ezt a problémát vizsgálják, itt van Nakkától egy grafikon amin szépen látszik minden:
A kék grafikonon kb 25g a gyorsulás pozitív irányban a motor működés alatt.
Kb 3s-nál kiég a motor, ekkor átvált negatívba a nagy légellenállás miatt. Ahogy csökken a sebesség, úgy csökken a lassulásból adódó negatív g.
15s-nál eléri a tetőpontot, a gyorsulás nulla.
Ernyőnyitás 19s-nál (a piropatron miatt látszik egy tüske a g-n), innen már csak ereszkedik, a gyorsulásmérő adata attól függ, hogy hogy milyen helyzetben van épp a rakéta a zsinóron.
Igen, pont ez van amit írsz. Viszont átforduláskor IS előjelet vált, hat rá a gravitációs erő.
Annak meg nincs értelme, hogy a baro szenzorral figyelem a magasságot és a holtpontot aztán a G szenzorral nyitom az ernyőt, az úgy nem redundáns, egymástól függetlenül kell működniük, nagyobb raksikban akár két szervóval.
Ezért kellene pár teszt fellövés, hogy lássuk mit mutat a G szenzor.
Srácok, a G-szenzor nem fog előjelet váltani a tetőponton! A rakéta mindig orrnehéz, vagyis orral előre repül. Felfelé folyamatosan lassul a légellenállás miatt, a tetőponton 0g (súlytalanság) van egy pillanatra. Aztán újra elkezd gyorsulni, de ezzel a légellenállás is nőni fog. Annyit lehet majd látni, hogy csökken, nulla, majd újra nő a g értéke. Ráadásul a motor égése alatt más az előjele és a kiégéskor fog előjelet váltani, de ott meg nem egészséges ernyőt nyitni.
A tetőpont érzékelésre a legtutibb módszer a barometrikus szenzorral a nyomásmérés (ha már elkezd újra nőni a légnyomás, akkor biztos megvolt a tetőpont), ezt ki lehet egészíteni fotoszenzorral - most már azt is fejlesztette a kitalálója és még jobb.
Egyenlőre megpróbálok ezzel a csővastagsággal próbálkozni különböző furatokkal, mert (szinte) szemétként kerül hozzám és nem viszi el azt a nagyon kevés szabadidőmet a kézzel gyártás, ráadásul ilyen hosszú működés alatt sem égett el, illetve elég erős a fala, de ennek ellenére nem túl nehéz. Amennyiben később esetleg nem sikerül több teszttel sem lényegi különbséget elérni csak akkor fogok váltani de valszeg akkor is már valami előre "gyártott" csőre.
Van belőle jó pár itthon, fúvóka illetve furatátmérő változtatásokkal tesztelek egy párat és jelentkezem.
5-6mm körüli fúvóka mérettel próbálkozz, ugyan ekkora furatátmérővel kicsit hosszabban. Olyan 30-35mm-el kezdetnek.
A fúvóka száraz bentonit por préselve, próbáld valamennyire alakhelyesre elkészíteni.
Az egyik legfontosabb, hogy jó legyen a motor a papírcső. Házilag nem könnyű jót csinálni, sokat próbálkoztam vele, a kínai, erre gyártott csövei sokkal jobbak voltak.
Szerintem kisérletezz kisebb 15-20mm ID-vel, azokat könnyebb stabilan elkészteni, 20mm fölött már jóval nehezebb.
A belső átmérő 25mm, az üzemanyag tömb 60mm hosszú és furatos volt, kb. 20mm hosszú és 3,5 mm-es volt a furat.
Az nekem is furcsa volt, hogy nagyon hosszú ideig működik a motor, lehetséges, hogy nagyobb átmérőjű furattal próbálkozzak és hosszabb furattal az égéstérbe?
Nem tudom mekkora motor volt, mennyi a papírcső belső átmérője (ID- Inner Diameter), de nem lesz elég ekkora tolóerő a biztonságos startoláshoz.
Nagyon lassan épül fel a nyomás, ebből az lesz, hogy a raksi megemelkedik, meglóg a pálcáról, de nem lesz elég sebessége, így el fog fordulni és kiszámíthatatlan irányba indul.
Ilyen kis motorok nagyon rövid, pár tized másodperces égésidejűek, akkor működnek jól.
Határozottan, és gyorsan kell kialakulnia a tlóerőnek, hogy a motor át tudja adni az impulzusát a rakétának.
Ebben az esetben is nem árt, ha van egy 7-10x-es pillanatnyi tolóerőd a raksi súlyához képest.
Gondolom nem furatos volt az égéstér ezért ilyen hosszú az égési idő. Fontos jól kikisérletezni a furat hosszát, és a fúvóka átmérőjét a motor ID-jéhez viszonyítva.
Ilyen kis papírmotorokba leginkább nem önteni szoktás a hajtóanyagot, hanem por formában préselni.
A KNSB egész jó hajtóanyag, a KNSU-val nekem nem voltak jó tapasztalataim.
Valahogy így kellene működnie egy 15mm ID-s KNSB motornak. egy pillanatra eléri a 15N tolóerőt, ezzel egy 170 grammos (repkész tömeg) raksit nagyon jól felvitt.
Nagyon, nagyon rég óta vártam, hogy belekezdhessek a modellezésbe, évekig csak olvasgattam, anyagot gyűjtöttem. Szépen lassan beszereztem a hozzávalókat és most a helyzetet kihasználva volt időm az elmúlt hetekben nekilátni.
Teljesen amatőr vagyok, ha valamit elírok vagy rosszul mondok, kérlek nézzétek el nekem.
Először a hajtóanyagot készítettem el és azzal csináltam egy tesztet:
Majd egy kezdetleges rakáta testet készítettem szárnyak és orrkúp nélkül, megnézve, hogy nem-e ég át illetve hogyan viselkedik a próba alatt. Sajnos a fúvókát nem sikerült jól illesztenem, mert a nyomás miatt a 4. másodpercben elrepült, de egyáltalán nem bánom, mert így tudom mikre kell figyelni az újabb tesztek alatt.
Pár dolog kimaradt belőle és szokás szerint kaputelefonnal tudtam csak felvenni, de remélem az infó átmegy.
A stat file-ban lévő adatokat azért nem a LOG-ba menti, hogy ne kelljen a szöveges részt kivagdosni az adathalmazból, így könnyebb beilleszteni és diagramot készíteni.
Maximum 50 mérést tud egyenként elmenteni (LOG50), utána a LOG0-ba menti ömlesztve. Ezért érdemes törölni a fileokat, ha 50 közelében van. Ennek technikai okai vannak, de gondolom elég sok mérés ez ahhoz, hogy ne okozzon problémát.



{kind=link}